FathomView¶
Overview¶
![]()
Underwater Image Enhancement using Deep Convolutional Neural Networks.
flowchart LR
input["Input Image<br><br><img src='/assets/code/fathomview/8-input.jpg' width='60'/>"]
fv[FathomView]
output["Enhanced Image<br><br><img src='/assets/code/fathomview/8-label.jpg' width='60'/>"]
%% Subgraph inside FathomView
subgraph fv [FathomView Pipeline]
preprocess["Preprocessing"]
model["UNet Model<br><br><img src='/assets/code/unet-diagram.png' width='60'/>"]
postprocess["Postprocessing"]
preprocess --> model --> postprocess
end
input --> fv --> outputFathomView implements a convolutional UNet-style encoder-decoder architecture to enhance underwater images by correcting color distortion, low contrast, and blurriness caused by light absorption and scattering in underwater environments.
The model is trained using supervised learning on paired datasets of underwater images and their corresponding enhanced versions, learning a direct image-to-image mapping to restore visual quality. Spatial detail is preserved through skip connections between encoder and decoder layers.
FathomView's U-Net architecture is compared against other models including traditional baselines and other deep learning approaches, demonstrating superior performance in terms of PSNR and SSIM metrics on benchmark underwater image datasets.
Results¶
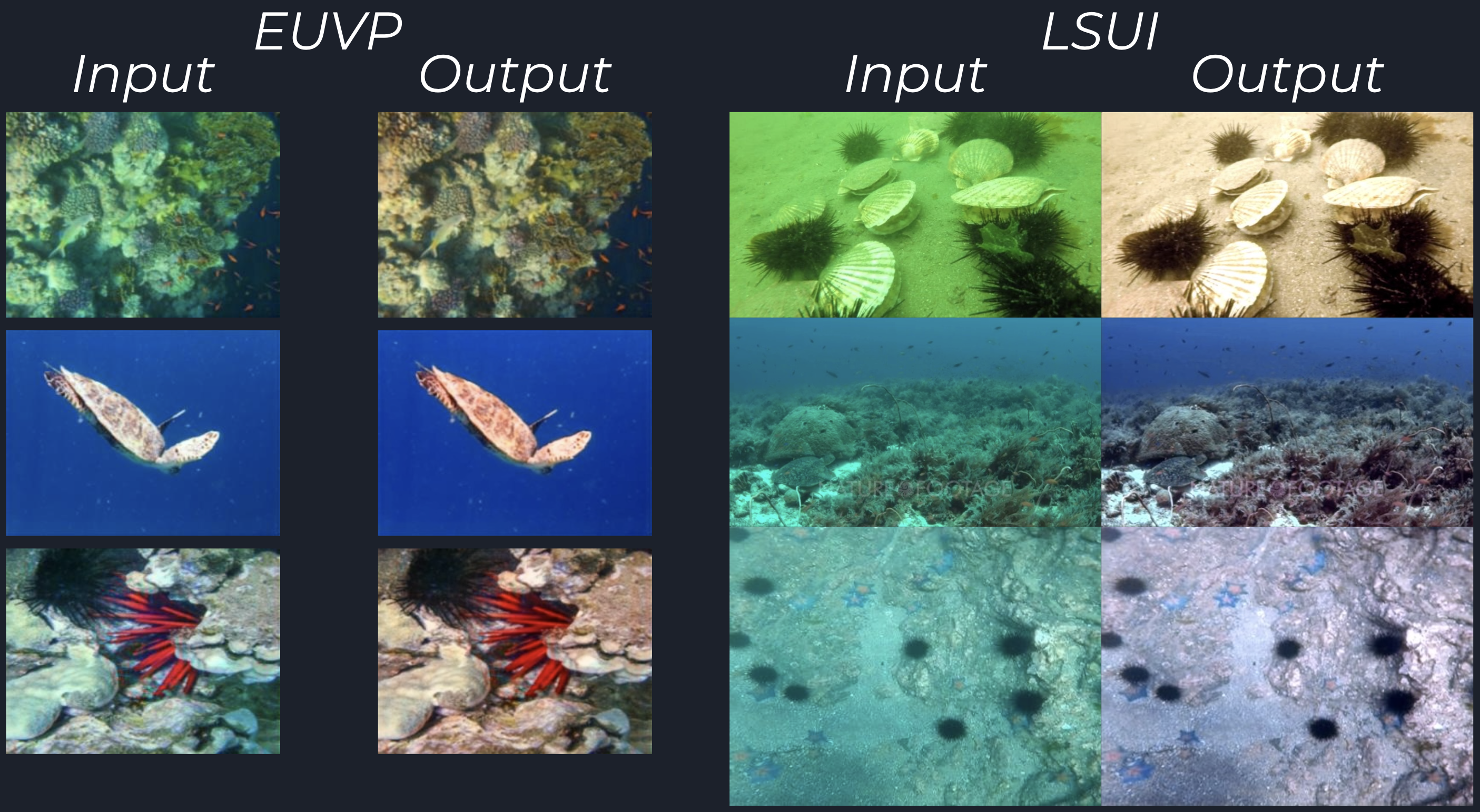
Comparing FathomView's output across datasets.
Left: Trained on EUVP dataset.
Right: Trained on LSUI dataset.
| Metric | FathomView | UCM | HE | MSRCR | Fusion | UDCP | IBLA | UGAN | WaterGAN |
|---|---|---|---|---|---|---|---|---|---|
MSE |
0.002 | 0.029 | 0.045 | 0.059 | 0.027 | 0.072 | 0.058 | 0.026 | 0.014 |
PSNR |
30.31 | 20.68 | 18.315 | 13.25 | 23.13 | 17.37 | 19.10 | 20.63 | 20.25 |
SSIM |
0.966 | 0.869 | 0.845 | 0.580 | 0.933 | 0.847 | 0.832 | 0.779 | 0.842 |
FathomView achieves the best performance in both PSNR and SSIM metrics, indicating better visual quality and detail preservation in enhanced images.
Key Components¶
UNet Architecture¶
class torch.nn.Module
class fathomview.models.UNet(nn.Module)
def __init__(self, in_channels: int, out_channels: int, init_features: int):
x = init_features
self.pool = nn.MaxPool2d(kernel_size=2, stride=2)
self.e1 = conv_block(in_channels, x) # 3 => 32
self.e2 = conv_block(x, x * 2) # 32 => 64
self.e3 = conv_block(x * 2, x * 4, dropout=True) # 64 => 128
self.b = conv_block(x * 4, x * 8, dropout=True) # 128 => 256
self.uc3 = nn.ConvTranspose2d(x * 8, x * 4, kernel_size=2, stride=2) # 256 => 128
self.uc2 = nn.ConvTranspose2d(x * 4, x * 2, kernel_size=2, stride=2) # 128 => 64
self.uc1 = nn.ConvTranspose2d(x * 2, x, kernel_size=2, stride=2) # 64 => 32
self.d3 = conv_block(x * 8, x * 4)
self.d2 = conv_block(x * 4, x * 2)
self.d1 = conv_block(x * 2, x)
self.conv = nn.Conv2d(x, out_channels, kernel_size=1)
def forward(self, x: torch.Tensor) -> torch.Tensor:
# Encoder (downsampling with max pooling)
enc1 = self.encoder1(x)
enc2 = self.encoder2(self.pool(enc1))
enc3 = self.encoder3(self.pool(enc2))
# Bottleneck
bottleneck = self.bottleneck(self.pool(enc3))
# Decoder (upsampling with transposed convolutions)
dec3 = self.upconv3(bottleneck)
dec3 = torch.cat((dec3, enc3), dim=1) # skip connection
dec3 = self.decoder3(dec3)
dec2 = self.upconv2(dec3)
dec2 = torch.cat((dec2, enc2), dim=1) # skip connection
dec2 = self.decoder2(dec2)
dec1 = self.upconv1(dec2)
dec1 = torch.cat((dec1, enc1), dim=1) # skip connection
dec1 = self.decoder1(dec1)
return self.conv(dec1)
def conv_block(in_channels, features, dropout=False):
layers = [
nn.Conv2d(in_channels, features, kernel_size=3, padding=1, bias=False),
nn.ReLU(inplace=True),
nn.Conv2d(features, features, kernel_size=3, padding=1, bias=False),
*( [nn.Dropout2d(0.3)] if dropout else []), # optional dropout layer
nn.ReLU(inplace=True),
]
return nn.Sequential(*layers)
The UNet class implements a standard encoder-decoder architecture with skip connections, originally introduced in (Ronneberger, Fischer, and Brox, 2015) for biomedical image segmentation and adapted here for underwater image enhancement.
It features symmetric downsampling and upsampling paths, feature reuse via concatenated skip connections, and optional dropout for regularization in deeper layers.
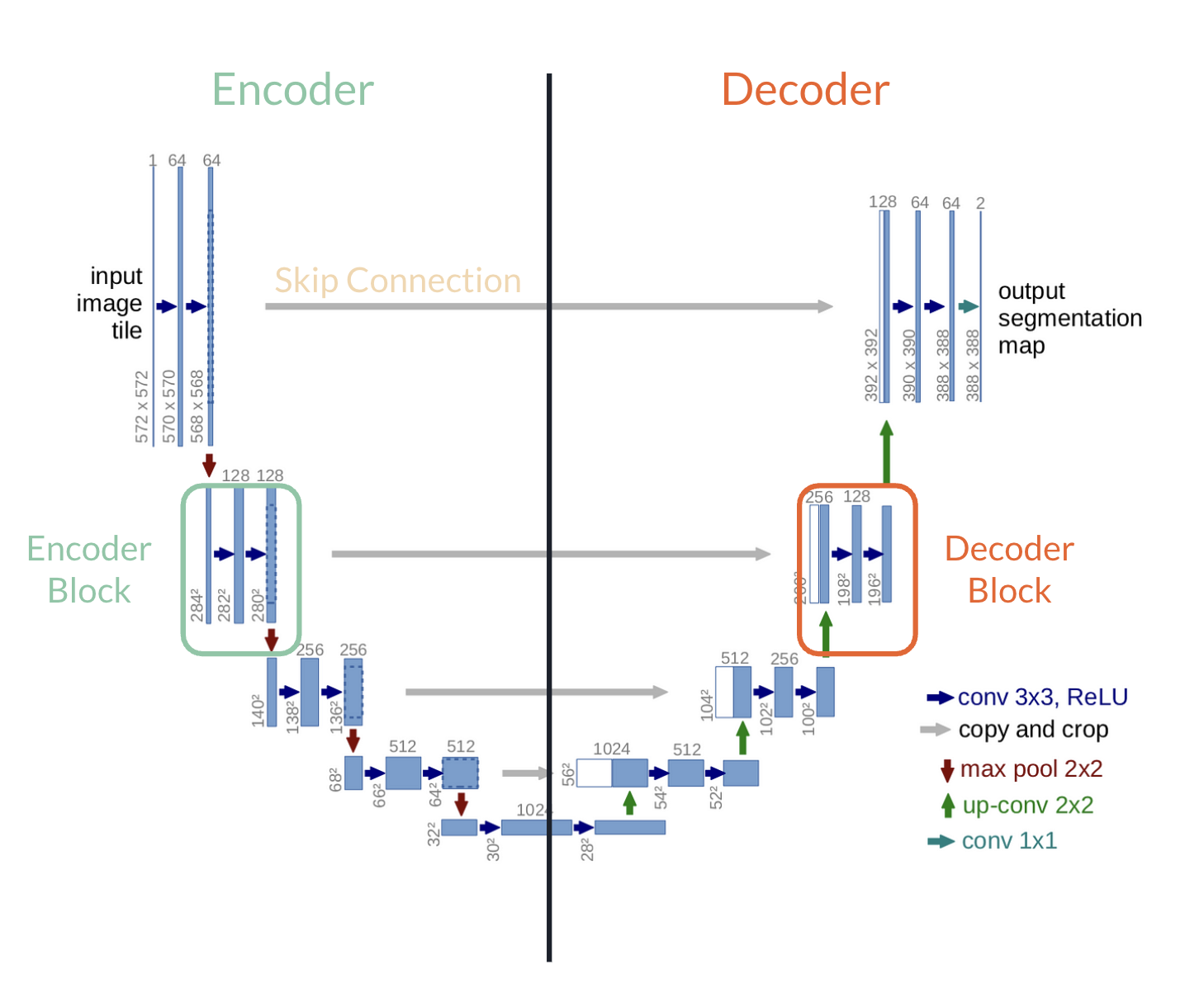
The overall UNet-style architecture of this work.
At a high level, the forward pass is responsible for defining a pass through the network with the following pipeline:
- Encoder: Downsample input image via max pooling, reducing spatial dimensions while increasing feature depth.
- Bottleneck: Highest-level feature representation; dropout applied to reduce overfitting.
- Decoder: Upsampling via transposed convolutions to restore original spatial resolution; skip connections concatenate encoder features.
While the above figure demonstrates this pass through in context with the various operations performed at each layer, the following diagram illustrates a high level overview of the encode-decode process with skip-connections.
graph TB
E1[Encoder 1]
E2[Encoder 2]
E3[Encoder 3]
B[Bottleneck]
D3[Decoder 3]
D2[Decoder 2]
D1[Decoder 1]
%% Connections
B --> D3
E1 --> E2
E2 --> E3
E3 --> B
D3 --> D2
D2 --> D1
%% Skip connections
E3 -.-> D3
E2 -.-> D2
E1 -.-> D1Objective (Loss) Function¶
L1 Loss - Mean Absolute Error (MSE)
- Measures the average absolute difference between predicted (x) and ground truth (y) pixels.
- Encourages high PSNR and preserves overall color and luminance.
- Limitation: ignores structural and perceptual features of images.
SSIM Loss - Structural SIMilarity
where
l(x, y)- luminance comparison (mean intensity)c(x, y)- contrast comparison (standard deviation)s(x, y)- structure comparison (correlation between patterns)- Exploits pixel inter-dependencies to evaluate structural similarity.
MS SSIM Loss - Multi-Scaled SSIM
- Computes SSIM over multiple scales (j) to capture both local textures and global structures.
- More sensitive to perceptual differences across different resolutions.
FathomView Loss
- Combines pixel-level accuracy (L1) with perceptual and structural similarity (MS-SSIM).
- Encourages enhanced images to maintain brightness, color, and structure.